Dentro del proyecto TAA se ha desarrollado un demostrador a partir de los análisis realizados sobre las distintas técnicas de SLAM
Entrenamiento y almacenamiento de una escena
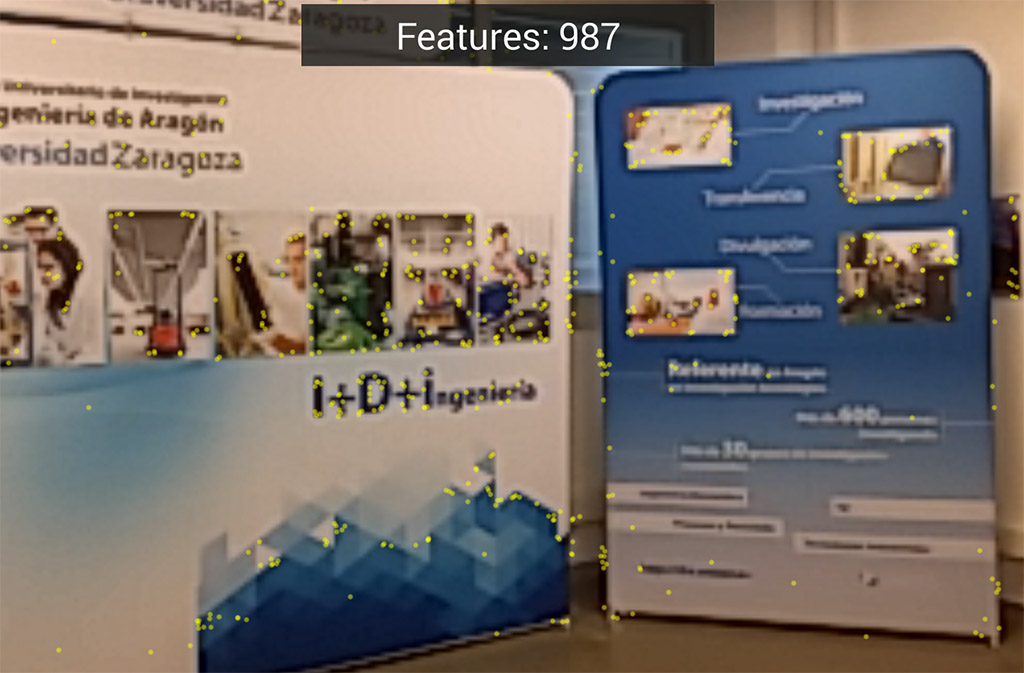
En este demostrador se tomó como base para el entrenamiento de la nube de puntos un stand del instituto de investigación, y como objetos virtuales el modelo 3D de un coche y un motor.

La aplicación de demostrador permitía la interacción con el entorno desde todos los puntos de vista posibles dentro de la sala en un rango de tres octavas, de tal manera que el usuario podía tener una visualización global de todo el contenido virtual sobre la imagen real, y acercarse a diferentes zona del stand para tener una visualización de mayor detalle de los objetos virtuales.

En ambos demostradores se incluye además un “shader” de reflexión y un modelo de iluminación basado en el entorno de la sala con el objetivo de mejorar la integración del contenido virtual.
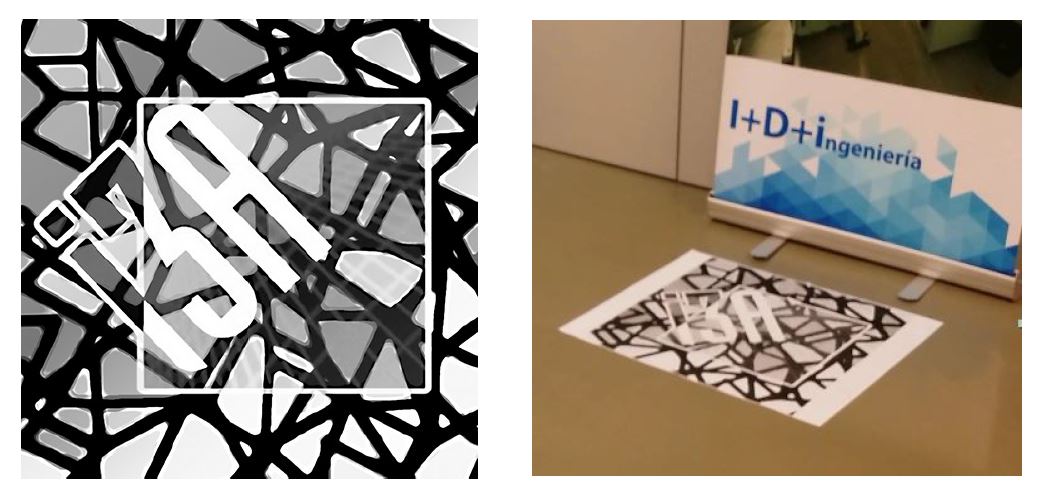
Entrenamiento en tiempo real en base a una referencia
Para esta segunda demostración se desarrolló una aplicación que implementaba el método de entrenamiento de la nube de puntos en tiempo de ejecución en base a un marcador de referencia.

La función de la aplicación era la de, una vez reconocido el entorno, permitir la disposición de
mobiliario virtual (mesas, sillas, estanterías) en tiempo real, para un posterior análisis de la
configuración realizada mediante la exploración de la escena.

Como muestra de los resultados alcanzados se presenta una producción del uso de la aplicación del demostrador en el espacio de pruebas en i3a.